
当研究室は、TECHNO-FRONTIER 2026に出展します!!
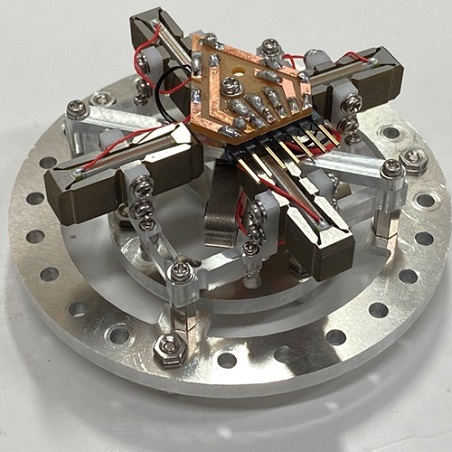
精密マニピュレータを搭載したホロノミック精密自走ロボットを展示予定です!
ご来場お待ちしております!
日時:2026年7月15日~7月17日
場所:東京ビッグサイト 西ウイング
小間:2-L40
当研究室は、2025国際ロボット展に出展しました!!
精密マニピュレータを搭載したホロノミック精密自走ロボットを展示しました!
たくさんのご来場ありがとうございました!


渕脇准教授によるオンライン展示の解説動画とPDFファイル、リーフレットもぜひご覧ください!!
本研究室に新しく、5名のB4と2名のM1が加わりました!
2026年度精密工学会春季大会にて,
渡辺君(B4)が発表しました!
国際ジャーナル論文誌Advanced Intelligent Systemsにてジャーナル論文を1件公開しました.< DOI>
Title : Sub-Micrometer-Precision Path Following of Piezo-Actuated Mobile Robot
第43回日本ロボット学会学術講演会 (RSJ2025) にて,
植野君(M2),大石君(B4),松井君(B4)が発表しました!
国際ジャーナル論文誌Advanced Intelligent Systemsにてジャーナル論文を1件公開しました.< DOI>
Title : Ultrafast Untethered Levitation Device Utilized Squeeze Film for Omni-Directional Transport
国際ジャーナル論文誌Advanced Intelligent Discoveryにてジャーナル論文を1件公開しました.< DOI>
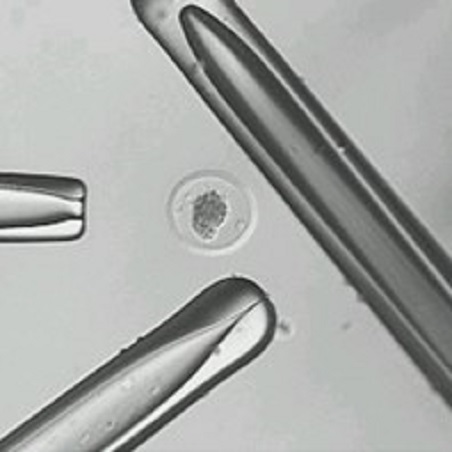
Title : Autonomous Machine Learning-Based Classification and Arrangement of Submillimeter Objects Using a Capillary Force Gripper
ロボティクス・メカトロニクス講演会2025にて,
北村君(M2),関根君(M2),石丸君(M1),後藤君(M1),関口君(M1)が発表しました!
本研究室に新しく、4名のB4と4名のM1が加わりました!
渕脇研ROUTE生の大石君(B3),松井君(B3),村上君(B3),林君(B2)がROUTE成果発表会にて発表を行いました!
また,松井君,村上君が博士会選出優秀研究賞を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
精密工学会 学生会員卒業研究発表講演会にて,B4の安藤君が発表しました!
国際ジャーナル論文誌Advanced Intelligent Systemsにてジャーナル論文を1件公開しました.< DOI>
Title : Untethered Autonomous Holonomic Mobile Micromanipulator for Operations in Isolated Confined Spaces
ミネベアミツミ株式会社 東京クロステックガーデン(汐留) を訪問し、技術本部の方々と
技術交流会を開催しました。
詳しくはニュースもご覧ください!
渕脇研M1の西村さんがバイオフロンティア若手優秀講演表彰を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
バイオフロンティア講演会にて,M1の西村さんが発表しました!
渕脇研M2の渡部君が精密工学会ベストプレゼンテーション賞を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
本研究室では、他大学からの大学院受験(修士・博士)を歓迎しています!
研究室訪問をご希望の方は、下記E-MAILアドレスまでご連絡ください。
E-mail: ml-fuchilab@gcl.ynu.ac.jp
精密工学会秋季大会にて,M2の渡部君が発表しました!
日本ロボット学会学術講演会にて,M2の津久井君,峯岸君,春原君,B4の石丸君が発表しました!
BSフジ「ガリレオX」で取材をいただきました!
番組タイトル:ガリレオX ロボットはどこまで小さくできるのか 極小ロボットが挑むミクロの領域
放送日時:2024年4月28日(日) 8時28分~9時00分 / 2024年5月5日(日) 8時28分~9時00分(再放送)
是非ご覧ください!
詳しくはニュースもご覧ください!
本研究室に新しく、4名のB4と1名のM1が加わりました!
渕脇研B4の関根君が日本ロボット学会優秀学生賞を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
渕脇研B4の関根君が計測自動制御学会優秀学生賞を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
渕脇研B4の関根君が精密工学会第31回学生卒業研究発表会エクセレントプレゼンテーション賞を受賞しました!
おめでとうございます!
詳しくはニュースもご覧ください!
国際ジャーナル論文誌Advanced Intelligent Systemsにてジャーナル論文を1件公開しました.<DOI>
Title : Automatic Holonomic Mobile Micromanipulator for Submillimeter Objects Inspired by the Rhinoceros Beetle
精密工学会春季大会にて,B4の関根君,西村さん,杉山さんが発表しました!
国際会議ASPENにて渕脇准教授,M2の木下君が発表しました!
精密工学会秋期大会にて,M2の楠井君,B4の関根君が発表しました!
本研究室に新しく、4名のB4が加わりました!
2022年度以前については,ニュースをご覧ください.
本研究室は文部科学省「若手研究者の自立的研究環境推進事業」(2008年度-2011年度)の支援を受け活動を開始しました。
皆様のご理解とご協力に深く感謝いたします。
| 助成団体 | 助成対象 |
|---|---|
 公益財団法人 三菱財団 |
研究費助成 (2025-2026年度) |
 公益財団法人 JKA |
海外渡航費助成 (2025年度) |
 公益財団法人 NSKメカトロニクス高度化財団 |
研究費助成 (2024-2025年度) |
 公益財団法人 高橋産業経済研究財団 |
研究費助成 (2023-2024年度) |
 一般財団法人 中西奨学会 |
研究費助成 (2018, 2024年度) |
 公益財団法人 津川モータ研究財団 |
研究費助成 (2022-2023年度) |
 公益財団法人 三豊科学技術振興協会 |
海外渡航費助成 (2023年度) 研究費助成 (2015年度) |
 公益財団法人 天野工業技術研究所 |
海外渡航費助成 (2023年度) 研究費助成 (2019年度) |
 公益財団法人 スズキ財団 |
海外渡航費助成 (2015, 2019, 2022, 2023年度) 研究費助成 (2015, 2020, 2026年度) |
 公益財団法人 中部電気利用基礎研究振興財団 |
出版費助成 (2020, 2022年度) 研究費助成 (2018年度) |
 公益財団法人 横浜学術教育振興財団 |
研究費助成 (2021年度) |
 公益財団法人 村田学術振興財団 |
海外渡航費助成 (2020, 2021年度) |
 一般財団法人 電子回路基板技術振興財団 |
研究費助成 (2021年度) |
 公益財団法人 マザック財団 |
研究費助成 (2016, 2020, 2026年度) |
 科学研究費助成事業 |
若手B (2010年度) 萌芽 (2012年度) 基盤C (2016年度-2018年度) |
 公益財団法人 御器谷科学技術財団 |
研究費助成 (2016年度) |
 一般財団法人 熱・電気エネルギー技術財団 |
研究費助成 (2016年度) |
 一般財団法人鷹野学術振興財団 |
研究費助成 (2015年度) |
© Copyrights Fuchiwaki laboratory. All Rights Reserved