研究内容
研究室概要
当研究室では、小型ロボット、小型アクチュエータ等の開発を通じて、小型軽量・省エネ・環境調和等の特長を生かした新技術の研究開発を行っています。
現在は、ホロノミック型自走ロボットの機構開発、エンコーダによるXYθ変位の精密計測、機械学習によるロボットの自動制御、液架橋力グリッパ、振動ピペットにより生じる局所流動を用いた液中精密マニピュレーション、SMAアクチュエータ、圧電アクチュエータ等を研究しています。
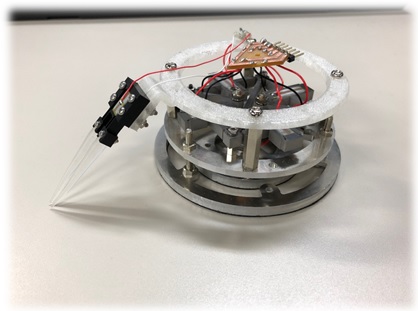
ホロノミック自走ロボット
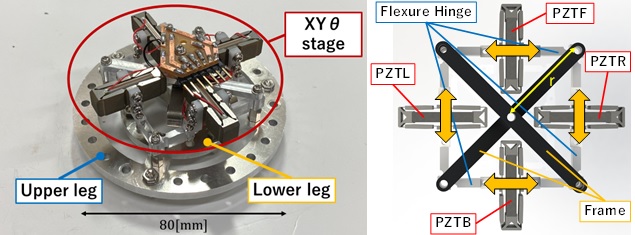
XYθステージの四つの圧電アクチュエータの伸縮周期の組み合わせにより、並進動作、回転動作及び公転動作が可能となっています。
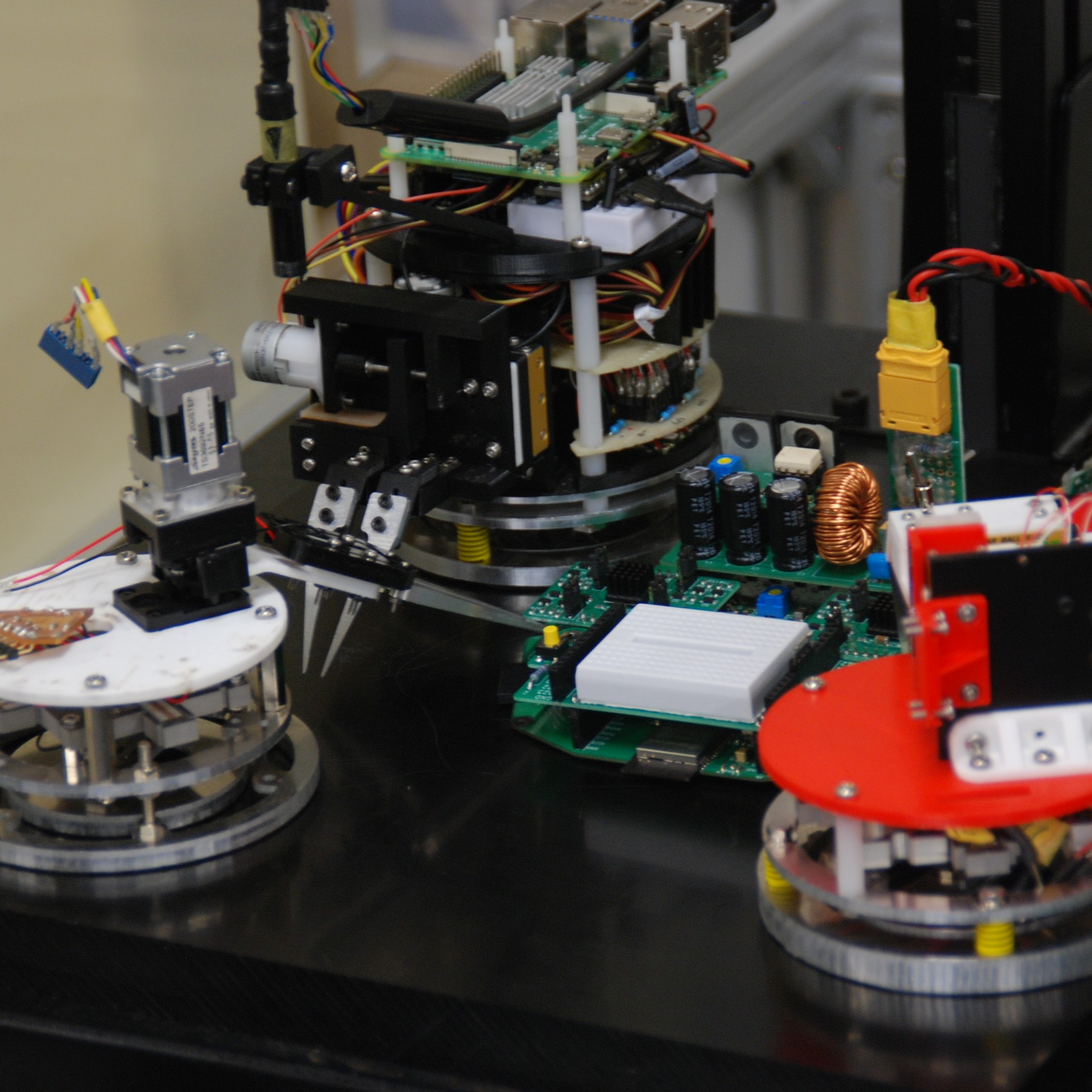
現在、機械学習を用いた自走機構の自動制御に関する研究を進めています。これまでに画像認識技術を用いた微小物体のピックアンドプレースを行うシステムの開発を行いました。
また、小型自走機構を複数台用いた協調精密作業に関する研究を進めています。これまでに群制御技術を用いた複数台の編隊制御機能付き広域誘導法の開発を行いました。
多数のロボットを協調作業させることで、省エネルギー、低振動、低床面積、独立三自由度の経路生成を特長とする超軽量ロボットファクトリの実現を目指しています。
液架橋力を用いたマニピュレーション装置の開発
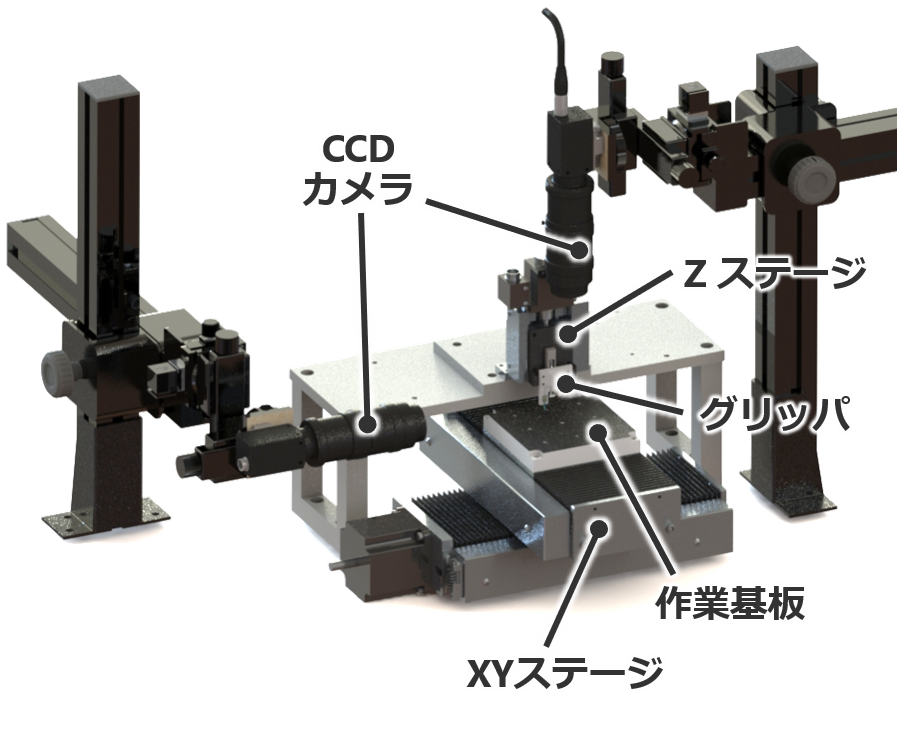
当研究室では、従来の物体操作技術とは一線を画すような液架橋力を用いたマニピュレーション装置の開発を行っています。液架橋力とは、水の表面張力とラプラス圧により発生する付着力のことを言います。マイクロスケールでは、スケール効果により重力よりも静電気力のような凝着力の方が支配的になります。そのため、エアノズルやピンセットで微小部品を操作する際にこの凝着力により先端に付着してしまいます。液架橋力は凝着力よりも支配的であるため、微小部品を操作するのに適しています。
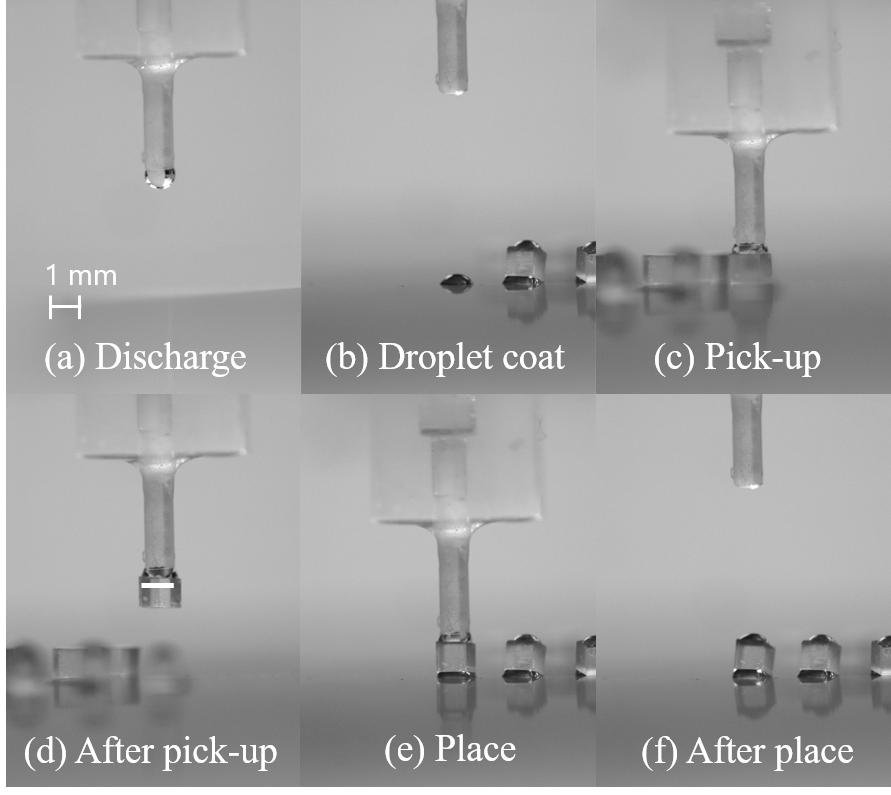
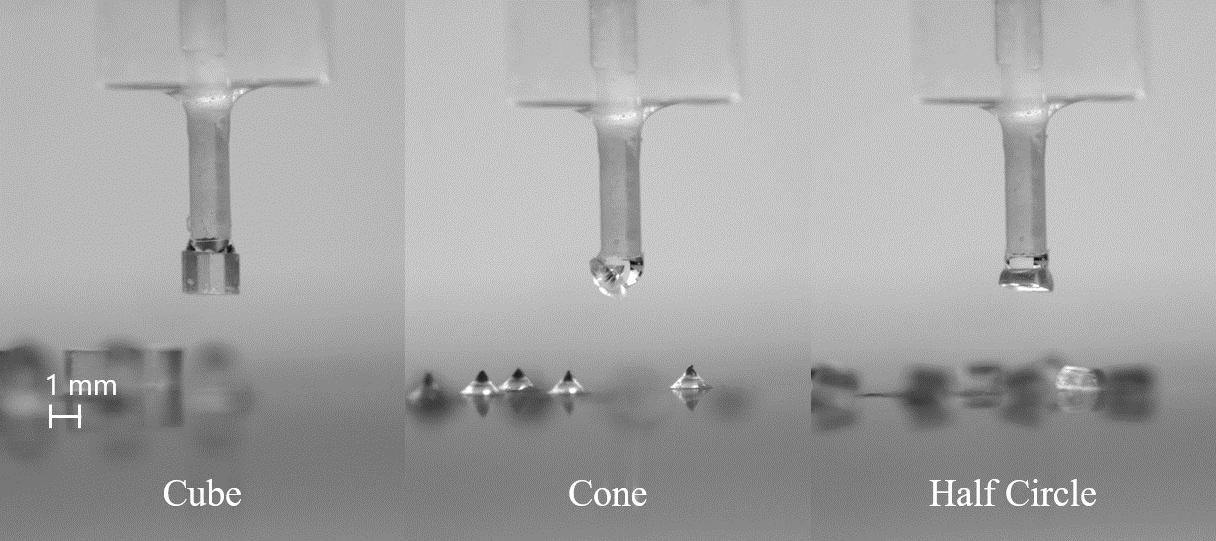
液架橋力はスケール効果による力の優位性だけでなく、操作対象の表面に沿って液体が付着することで、表面形状による影響が少ないことや傷つけにくい等の利点を併せ持ちます。これまでに毛管現象を用いて、持続的にグリッパ先端に液体を供給し続ける機構を開発しました。この機構では、立方体や三角錐、半円柱のような様々な形状の部品のピックアップに成功しています。
液中マニピュレーション

卵細胞の精密操作をするには、従来はホールディングピペットやインジェクションピペットを用いて、吸ったり吐いたりして適当に回転させていました。この方法では熟練を要する、時間がかかる、精密な回転ができない等の課題があります。
本研究では、ピペットを微小振動させることでピペット近傍の液体に局所流動を発生させ、その流れを利用して微小物や細胞を非接触で回転位置決めすることを目的としています。
応用分野として、精密自走ロボットにツールを搭載し、複数台を協調作業させることで細胞操作することを考えています